View Affiliations
School of Computing & Information Technology, University of Wollongong, Wollongong, 2500, Australia
Optimization of Query Processing on Multi-tiered Persistent Storage

Adv. Sci. Technol. Eng. Syst. J. 7(6), 20–30 (2022);
 DOI: 10.25046/aj070603
DOI: 10.25046/aj070603
The efficient processing of database applications on computing systems with multi-tiered persistent storage devices needs specialized algorithms to create optimal persistent storage management plans. A correct allocation and deallocation of multi-tiered persistent storage may significantly improve the overall performance of data processing. This paper describes the new algorithms that create allocation and deallocation plans for computing systems with multi-tiered persistent storage devices. One of the main contributions of this paper is an extension and application of a notation of Petri nets to describe the data flows in multi-tiered persistent storage. This work assumes a pipelined data processing model and uses a formalism of extended Petri nets to describe the data flows between the tiers of persistent storage. The algorithms presented in the paper perform linearization of the extended Petri nets to generate the optimal persistent storage allocation/deallocation plans. The paper describes the experiments that validate the data allocation/deallocation plans for multi-tiered persistent storage and shows the improvements in performance compared with the random data allocation/deallocation plans.
1. Introduction
In the last decade, we have observed the fast-growing consumption of persistent storage used to implement operational and analytical databases [1]. While the databases become larger, the total number of database applications also continuously increases and the applications themselves, especially the analytical ones, become more sophisticated and advanced than before [2]. Such trends increase the pressure on hardware resources for data processing, particularly on high-capacity and fast persistent storage devices.
Usually, the financial constraints invalidate the single-step replacements of all available persistent storage devices with better ones. Instead, a typical strategy is based on the continuous and systematic replacements of persistent storage devices with only a few at a time. Also, from an economic point of view, it is not worth investing significant funds in faster and larger persistent storage devices when only some of the available data is frequently processed. In reality, only some data sets are accessed more frequently than others. Financial and data processing requirements lead to the simultaneous utilization of persistent storage devices of different speeds and capacities. Therefore, data is distributed over many different storage devices with various capacity and speed characteristics [3]. This leads to a logical model of the multi-tiered organization of persistent storage [4, 5]. The lower tiers (levels) consist of higher capacity and slower persistent storage devices than the lower capacity and faster devices at the higher levels.
Several research works have been already performed on the automatic allocation of storage resources over multi-tiered persistent storage devices and multi-tier caches. For example, in one of the solutions, persistent storage can be allocated over several cache tiers and in different arrangements [6]. Another research work shows how to distribute data on disk storage in the multi-tier hybrid storage system (MTHS) [7].
A number of approaches schedule the allocation of resources over multi-tiered persistent devices based on future predicted workloads. The algorithms for an optimal allocation of persistent storage on multi-tiered devices in environments where future workloads can be predicted have been proposed in [8, 9]. These algorithms arrange data according to an expected workload and contribute to the automated performance tuning of database applications. Most of the existing research outcomes show that performance tuning with the predicted database workloads improves performance during processing time and reduces database administration time [10].
A logical model of multi-tiered persistent storage consists of several tiers (levels) of persistent storage visible as a single persistent storage container. The processing speeds at the same tier are alike. Each tier is divided into several partitions, where each partition is a logical view of a physical persistent storage device that implements a particular tier. Such a view is compatible with the organization of persistent storage within cloud systems. Nowadays, data can be stored on several remote devices. It contributes to the changes in the working style where the employees can work from home or distance. Therefore, storage on the cloud is required to provide access to data online anywhere, anytime over an internet connection. In addition, cloud storage for organizations must be shared by many users. Therefore, partitioning of persistent storage is required so that users can access storage simultaneously. Also, the efficient management of storage allocation on multi-tiered persistent storage with partitions is an essential factor for the performance of cloud systems.
The illustration of multi-tiered persistent storage with partitions is shown in Figure 1. Typically, the higher tiers of persistent storage have lower capacities and faster access times than the lower tiers. In a physical model, a sample multi-tiered persistent storage consists of the physical persistent storage devices available on the market, such as NVMe, SSD, and HDD [3].
Efficient processing of data stored at multi-tiered persistent storage is an interesting problem. When processed, data can “flow” from lower tiers to free space at the higher tiers to speed-up access to such data in the future. Scheduling the data transfers between the tiers require the allocation/deallocation of data based on the speed and capacities of the tiers. Thus, making the correct scheduling decisions automatically and within a short period of time becomes a critical factor for the overall performance of data processing.
Because of its limited capacity, it is impossible to store all data at the topmost and the fastest tier. Therefore, we must prepare for a compromise between the capacity, speed, and price of available multi-tiered persistent storage. Such compromise leads to all data being distributed over many tiers of multi-tiered persistent storage.
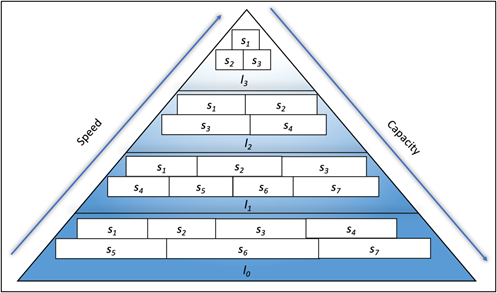
Figure 1: Illustration of multi-tiered persistent storage with four tiers divided into partitions
The main research objective of this work is to speed up data processing in environments where all data is located at multi-tiered persistent storage. We assume that data processing is organized as a collection of pipelines where the outputs from one operation are the inputs to the next operation in a pipeline. A strategy to speed up the data processing in a pipeline is to write the outputs of each operation to the highest available persistent tiers. The benefits of such a strategy are twofold. First, data is written faster at the higher tiers than at the lower ones. Second, the following operation in a pipeline reads input data more quickly from the higher tiers. An essential factor in such a strategy is an optimal release of persistent storage allocated at the higher tiers to store temporary data.
Another problem addressed in the paper is the lower-level optimization of query processing on multi-tiered persistent storage. The present query optimizers do not consider an efficient implementation of higher-level operations on data located at multi-tiered persistent storage. However, it is possible to significantly improve performance by implementing higher-level operations in ways consistent with the characteristics of available persistent storage. Our second research objective is to generate more efficient data processing plans for predicted and unpredicted database workloads through the optimal implementation of elementary operations on data located at multi-tiered persistent storage.
The contributions of the paper are the following. First, the paper shows how to extend and apply a notation of Petri nets to describe the data flows in multi-tiered persistent storage. Second, the paper presents the algorithms that find optimal query processing plans through the linearization of Petri nets. Third, the paper analyses the results of experiments to show that query processing plans generated by the new algorithms efficiently use the properties of multi-tiered persistent storage.
This paper is an extension of work originally presented in [11]. The paper is organized in the following way. Section 2 extends a notation of Petri nets to describe data flow in query processing. Sections 3 and 4 present the algorithms for the automatic allocation of storage available on multi-tiered persistent storage devices. Section 5 describes an experiment, and Section 6 summarizes the paper.
2. Basic Concepts
In this work, we consider a scenario where a database application submits an SQL query to a relational database server. Then, a typical query optimizer finds an optimal query processing plan. Such a plan includes the list of operations organized as a directed bipartite graph. Then, to discover the data flows between the elementary operations, a plan is transformed into an extended Petri Net [12]. Finally, a graphical notation of Petri Nets represents the flow of data when processing a query.
The original Petri net model includes two types of elements: places and transactions. Places are denoted as circles, and transactions are denoted as vertical rectangles. Zero or more tokens, denoted as small black circles, can be located in the places. Arcs are connected between places and transactions—the illustration of Petri Net is shown in Figure 2.
An Extended Petri Net is quadruple <B, E, A, W> where B and E are disjoint sets of places and transitions. Places are visualized as circles, and transitions are visualized as rectangles or bars. Arcs A Í (B × E) È (E × B) connect the places and transitions. A place may contain a finite number of tokens visualized as black circles, or it can be empty. A transition fires depending on the number of tokens connected at the input place. When an input place has no token, a transition is at a waiting state.
In our case, sets of places, B, are interpreted as input/output data sets, and the sets of transitions, E, are interpreted as operations on data sets (see Figure 3 below).
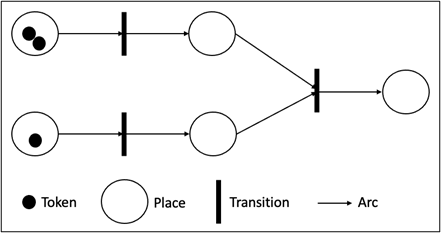
Figure 2: An original sample structure of a Petri net
Arcs, A, determine the input and output data sets of the operations. A weight function W: A→N+ determines the estimated total number of data blocks read and written by each operation. See the numbers attached to the arcs in Figure3. The root nodes are the places (data sets) in B that do not have the arcs from the transitions (operations) E. The root nodes represent the input data sets located in a database. An operation can have more than one input and output data set. Likewise, more than one operation can share input and output data sets.
There are two types of persistent storage data sets B: permanent or temporary. Both types of data sets are stored in multi-tiered storage. A temporary data set can be removed from the storage when it is no longer needed.
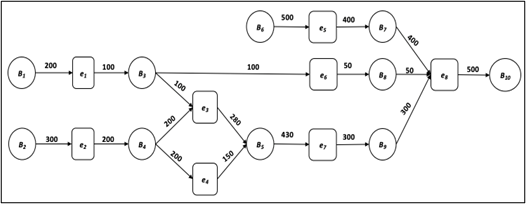
Figure 3: Data processing and data flows represented as an extended Petri net
Let E = {ei, …, ej} be a set of operations obtained for a query Q processing plan created by a database query optimizer. Each operation ei is represented by a pair ei = ({Bi, …, Bm}, {B(m+1), …, Bn}), where {Bi, …, Bm} are the input data sets and {B(m+1), …, Bn} are the output data sets of an operation ei in E. Some of the input and output data sets processed by an operation ei are permanent, and some of them are temporary.
This paper focuses on managing the multi-tiered persistent storage efficiently for each input/output data sets of each operation and generates the best allocation plan, called a processing plan, for each query. A list of persistent storage tiers is denoted as a sequence L = <l0, …, ln>. We have n+1 tiers where l0 denotes the lowest tier, called a base tier or a backup tier. The highest tier is denoted by ln. Each tier li for i = 0 … n is described as a triple (ri, wi, <si1, …, sin>) where ri is a read speed per data block at tier li, wi is a write speed per data block at tier li, and <si1, …, sin> is a sequence of partitions arranged from smallest available storage to largest available storage, where sij is an amount of free space available in partition j at tier li. The read and write speed per data block is measured in the standardized time units that can be converted into real-time units when a specific hardware implementation of a persistent storage tier is considered.
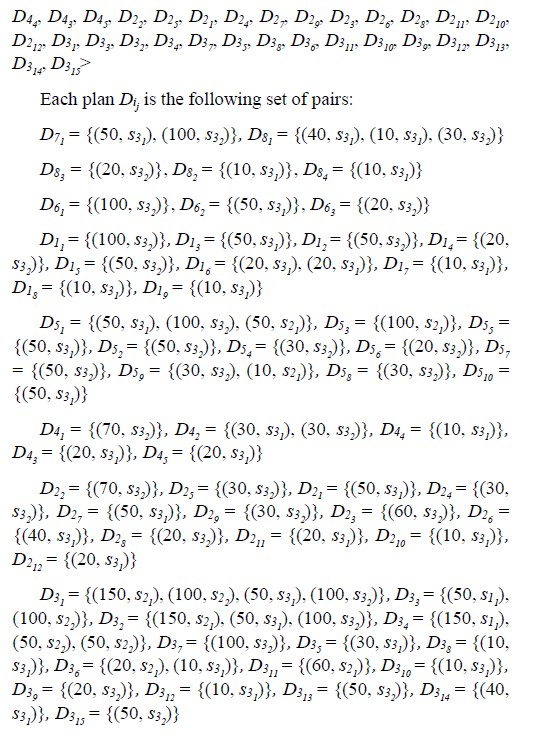
The processing plan is denoted as P = <Dij, …, Dnk>, where Dji is a set of plans for an operation ei, where ei is in Esj. Each plan is a pair and is denoted as (Bi, sni) and Bi is the total number of input/output data blocks located in partition i in tier ln (index of sni). If lj = l0, then the data blocks are located at the lowest tier in the multi-tiered storage.
After the output result of the operation ei is allocated, unnecessary temporary input storage of operation ei needs to be removed from multi-tiered persistent storage according to the persistent storage release plan. The persistent storage release plan is denoted as a sequence of pairs δ = < (ei, (Bk, …, Bh)), …, (ej, (Bx, …, By))>, where each pair (ei, (Bk, …, Bh) is a group of data sets (Bk, …, Bh) that can be released after the results of an operation ei are saved.
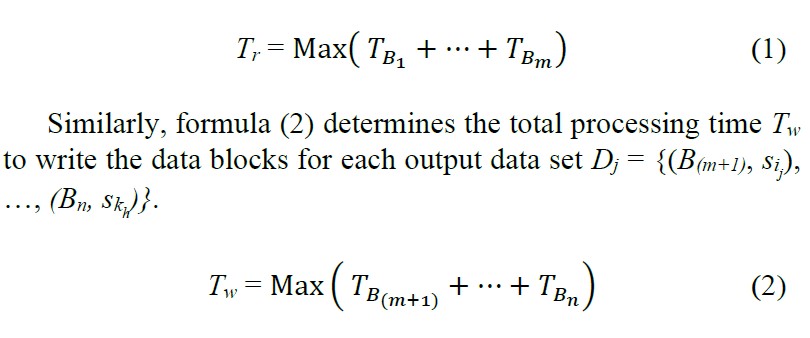
Then, the total processing time to read (Bi, sij) data blocks located at partition j in tier li is TBi = Bi * ri. Formula (1) given below determines the total processing time Tr to read the data blocks for each input data set Di = {(B1, snj), …, (Bm, skn)}.
Let an Extended Petri Net <B, E, A, W> represent a query processing plan. Then, whenever it is possible, the output data sets of the operations E = {ei, …, ek} are written to the tiers located above the tiers of their input data sets. In other words, whenever possible, each operation tries to push up the results of its processing towards the partition at the higher tiers of persistent storage.
The benefits of such a strategy are as follows. First, it is faster to write the output data sets at a higher tier than at a lower tier. Second, the data sets written at a higher tier can be read faster by the next operation in a pipeline of a query processing plan. Therefore, the benefits include the time we gain from writing output data sets to the higher tiers and from reading the same data sets by the other operations.
3. Resource Allocation for a Single Query
This section describes the algorithms that convert a query processing plan obtained from the execution of EXPLAIN PLAN statement for a single query into an Extended Petri Net and serialize the operations of the Net in order to minimize the amounts of persistent storage required for query processing.
3.1. Creation of Extended Petri Net
We consider a query Q expressed as a SELECT statement and submitted for processing by a relational database server operating on multi-tiered persistent storage. A query Q is ad-hoc processed by the system in the following way. First, a query optimizer transforms the query into the best query processing plan. SQL statement EXPLAIN PLAN can be used to list a plan found by a query optimizer. Next, the implementations of extended relational algebra operations such as selection, projection, join, anti-join, sorting, grouping, and aggregate functions are embedded into the query processing plan. Then, the plan is converted into an Extended Petri Net.
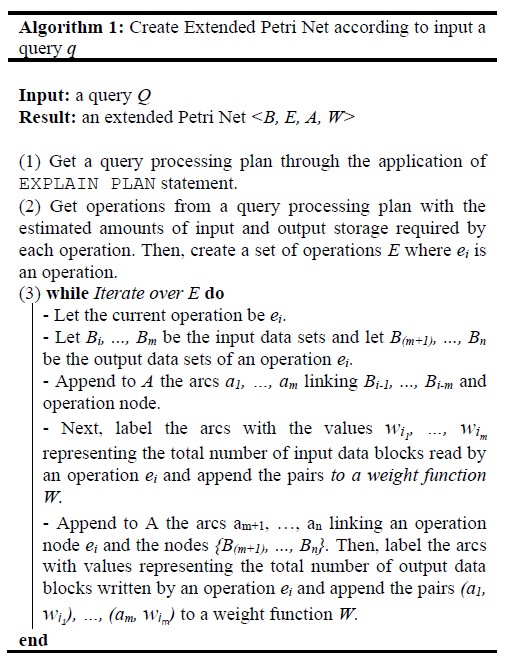
Operation ej Î E where ej is member of query Q. Each operation has the estimated amounts of input data to be read from persistent storage and the estimated output amounts of data to be saved in persistent storage. Algorithm 1 below transforms a query Q into an Extended Petri Net.
The algorithm obtains a query processing plan from the results of the EXPLAIN PLAN statement. From there, we get a set of operations E = {ei, …, em}. A query processing plan provides information about the input data sets read by the operations and the output data sets written by the operations. The permanent and temporary data sets read and written by the operations in E form a set of places B in Extended Petri Net. The arcs leading from the input data sets to the operations and the arcs leading from the operations to the output data sets create a set of arcs A. A query processing plan provides information about the amounts of storage read and written by the operations. Such values contribute to the weight values wj attached to each arc and are represented by a pair (aj, wj) in W. A weight value wj attached to an arc between the input data set and an operation represents the total number of data blocks read by the operation. A weight value wj attached to an arc between the operation and output data set represents the total number of data blocks written by the operation.
3.2. Serialization of Extended Petri Net
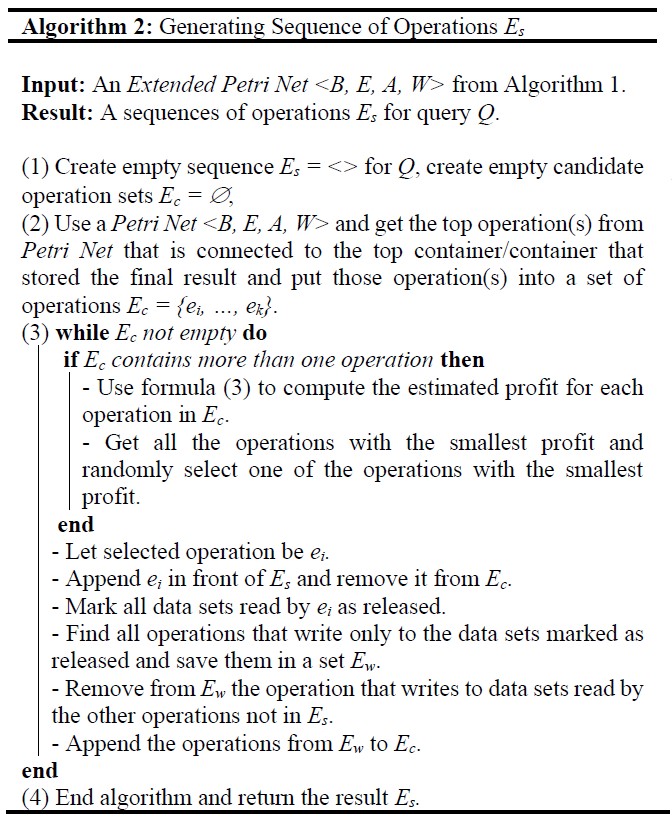
Preparation of an Extended Petri Net <B, E, A, W> for processing requires serialization of its operations in a set E. Serialization arranges a set of operations E into a sequence of operations Es. There exist many ways that the operations in E can be serialized in the implementations of more complex queries. If the operations in E can be serialized in more than one way, then we try to find a serialization that requires smaller amounts of persistent storage for its processing. Algorithm 2 finds a serialization of operations in E that tries to minimize the total amounts of persistent storage allocated during query processing. As a simple example, consider an Extended Petri Net given in Figure 3. The operations e1 and e2 write 100 and 200 units of persistent storage. Then, 100 units of persistent storage are released after the processing of operations e3 and e6, and 200 units of persistent storage are released after the processing of operations e3 and e4. Since the processing of e3 and e4 releases more storage, we assign e3 and e4 before e6 in the serialization.
A root operation in E is an operation such that at least one of its input arguments is a permanent data set that belongs to the contents of a database. A top persistent storage data set in B is a data set that contains the final results of query processing and such that is not read by any other operation in E. It is possible that a query may output more than one top persistent storage data set. A top operation is an operation that writes only to the top persistent storage data sets.
Algorithm 2 traverses the arrows in A backward from the top operations to the root operations and generates a sequence of operations Es from a set of operations E.
At the very beginning, a sequence of operations Es is empty, and none of the persistent storage data sets in B is marked as released. In the first step, the algorithm finds the top operations and inserts such operations into a set of candidate operations Ec.
For each operation in Ec, the algorithm computes profit using formula (4). To compute profit, the algorithm deducts the total amounts of persistent storage allocated by an operation from the total amounts of persistent storage released by an operation. For example, assume that the current operation is ei. To find the amounts of persistent storage released by an operation ei, we perform the summation of the amounts of storage in all input data sets of operation ei not marked as released yet. It is denoted by . To find the profits from the processing of an operation ei, we deduct from the released amounts the amounts of persistent storage included in the output data sets of the operation and denoted as in formula (3) below.

The profits are computed for each operation in Ec. The algorithm selects an operation with the smallest profit. If more than one operation has the smallest profit, then the algorithm randomly chooses one of them. Let a selected operation be ei. The algorithm removes ei from Ec, appends it in front of Es, and marks all data sets read by ei as released. Next, the algorithm finds the operations that write only to data sets marked as released by ei, such that data sets released by ei are read only by the operation already in Es. An objective is to find the operations that can be appended to Ec in a correct order of processing determined by a set of arcs A. Then, the algorithm appends those selected operations to a set of candidate operations Ec and the profits for each operation in Ec are computed again. An operation with the lowest profits is appended in front of Ec. The algorithm repeats the procedure until all operations in E are appended in front of Es.
Example1: The example explains a sample trace of Algorithm 2 when applied to an Extended Petri Net given in Figure3. In the first step, Ec contains only one operation e8 connected to top data set B11. Therefore, e8 has the lowest profit in Ec. We append it in front of Es = <e8> and we remove it from Ec. The data sets B5, B6, and B7 read only by e8 are marked as released. The operations writing only to the data sets B8, B9, and B10 are e5, e6, e7. None of the data sets B8, B9, and B10 are read by an operation that is not in Es. Hence the operations e5, e6, e7 can be added to Ec = {e5, e6, e7}. The estimated profits for each operation computed with a formula (3) are the following: p(e5) = (0 – 400) = -400, p(e6) = (100 – 50) = 50 and p(e7) = (430 – 300) = 70. According to those results, e5 is picked, appended in front of Es = <e5, e8>, and removed from Ec = {e6, e7}. A data set B7 is an input data set, and it cannot be marked as released. As no new data sets are released, Ec remains the same. Next, an operation e6 which has the second smallest profit, is taken from Ec. It is appended in front of Es = <e6, e5, e8> and is removed from Ec = {e7}. A data set B3 read by e6 is marked as released. A data set B3 is marked as written by operation e1 and later it is read by e3. In this case, e1 cannot be appended to Ec because a data set B3 is read by e3 that is not assigned to Es yet. Next, e7 is taken from Ec, it is appended in front of Es = <e7, e6, e5, e8>, and is removed from Ec. A data set B5 read by e7 is marked as released. A data set B5 is written by the operations e3 and e4. Both operations are appended to Ec = {e3, e4}. The computations of the profits provide: p(e3) = 0 – 280 = -280 and p(e4) = 0 – 150 = -150. According to the results, e3 is appended in front of Es = <e3, e7, e6, e5, e8> and it is removed from Ec = {e4}. The data sets B3 and B4 read by e3 are marked as released. The operations e1 and e2 are written to data sets B3 and B4. An operation e1 can be appended into Ec because e6 that read B3 is already assigned in Es. An operation e2 cannot be appended into Ec = {e1, e4} because e4 that reads a data set B4 is not in Es yet. The computations of the profits provide: p(e1) = 0 – 100 = -100 and p(e4) = 200 – 150 = 50. According to the results, e1 is appended in front of Es = <e1, e3, e7, e6, e5, e8> and is removed from Ec = {e4}. Operation e1 reads an input data set, therefore, no new operations can be added to Ec. Next, operation e4 is append to Es = <e4, e1, e3, e7, e6, e5, e8> and is removed from Ec. A data set B4 read by e4 is marked as released and operation e2 is appended to Ec. Finally, operation e2 is appended in front of Es = <e2, e4, e1, e3, e7, e6, e5, e8>. Operation e2 reads from an input data set and because of that, no more operations can be assigned to Ec. The final sequence of operations Es = <e2, e4, e1, e3, e7, e6, e5, e8> is generated at the end.
3.3 Estimation of Storage Requirements and Generation of Persistent Storage Release Plan
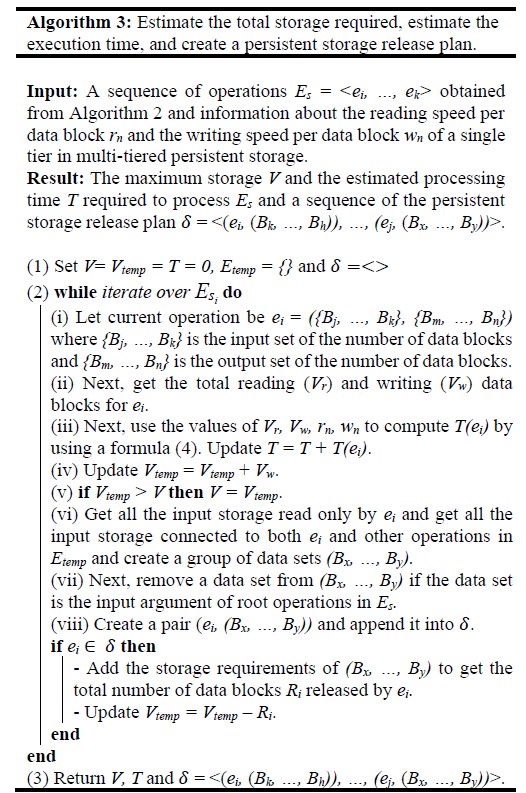
A sequence of operation Es obtained from the linearization of an Extended Petri Net with Algorithm 2 is used to estimate the requirements on the amounts of persistent storage needed for the processing of the sequence. Algorithm 3 estimates the persistent storage requirements while processing the operations in Es. The output of Algorithm 3 is the estimated processing time T for Es using the read/write speed of single-tier, the maximum required storage V to process Es, and a sequence of the persistent storage release plans = <(ei, (Bk, …, Bh)), …, (ej, (Bx, …, By))>.
Algorithm 3 uses a sequence of operations Es and information about reading speed per data block rn and writing speed per data block wn parameters unchanged and extracted from a single tier in multi-tiered persistent storage. Typically, the algorithm is processed with the read/write parameters of the highest tier. First, the algorithm sets V = 0, which stores the maximum storage required to be allocated in the multi-tiered persistent storage, and T = 0, which stores the estimated processing time for Es. Next, the algorithm iterates over Es in step (2) in Algorithm 3 and lets the current operation be ei. First, the total read storage Vr is computed by summing all input storage for ei and the total write storage Vw is computed by summing all output storage for ei. After that, the current temporary storage Vtemp = Vtemp + Vw is updated, where Vtemp stores the temporary storage required to process until the current operation. Next, the algorithm compares Vtemp with V. If Vtemp is larger than V, then V = Vtemp is updated. Next, the algorithm computes the estimated total processing time ti for current operation ei using the following equation.
T(ei) = (Vr * rn) + (Vw * wn) (4)
Then, the algorithm updates the total processing time until operation ei by summing T = T + T(ei).
Next, the algorithm gets the storage released by operation ei, denoted as a pair (ei, (Bx, …, By)). The detailed procedure is shown from step (2)(vi) to step (2)(viii) in the algorithm. After this, the storage is appended into the persistent storage release plan .
If ei is the member of then the algorithm needs to release data blocks after the output data blocks of ei are allocated. Next, the algorithm needs to update Vtemp = Vtemp – the total number of release storage by ei.
Algorithm 3 iterates those procedures above for each operation from the input sequence Esi. Finally, Algorithm 3 will generate V, T, and = <(ei, (Bk, …, Bh)), …, (ej, (Bx, …, By))>.
Example 2: A sample trace of Algorithm 3 is performed on a sequence of operations Es = <e2, e4, e1, e3, e7, e6, e5, e8> from Example 1 together with the reading and writing speed per data block from the highest tier l3 = (0.05, 0.055, <500, 300, 100>). As it has been mentioned before, the reading and writing speed per data block is measured in the standardized time units.
At the very beginning, we set V = Vtemp = T = 0, and . Next, we iterate over Es, and let the current operation be e2. It reads Vr = 300 data blocks and writes Vw = 200 data blocks. Next, we compute t2 = (300*0.05) + (200*0.055) = 26 and update T = T + t2 = 26. Then, we set Vtemp = V = 200. A persistent storage release plan remains empty because e2 is the first operation in the sequence Es.
In the next iteration, the current operation is e4. We compute t4 = (200*0.05) + (150*0.055) = 18.25 and update T = 26 + 18.25 = 44.25 and Vtemp = 200 + 150 = 350. Due to Vtemp being larger than V, we increase V = 350. The operation does not release storage and there is no need to update
In the next iteration e1 is the current operation. T = 59.75, Vtemp = 350 + 100 = 450 and V= 450.
In the next iteration e3 is the current operation. T = 90.15, Vtemp = 450 + 280 =730 and V = 730. This time, e3 released 200 data blocks, therefore, we need to update = <(e3, (B4))>. Total number of data blocks released by e3 is 200. Therefore, we update Vtemp = 730 – 200 = 530.
In the next iteration, e7 is the current operation. T = 128.15 and Vtemp = 530 + 300 = 830 and V= 830. This time we release storage B5 and update = <(e3, (B4)), (e7, (B5)) > and Vtemp = 830 – 430 = 400.
In the next iteration, e6 is the current operation. T = 135.9 and Vtemp = 400 + 50 = 450 and V= 830. The storage released by e6 is B3 and update = <(e3, (B4)), (e7, (B5)), (e6, (B3)) > and Vtemp = 450 – 100 = 350.
In the next iteration, e5 is the current operation. The algorithm computes T = 182.9 and Vtemp = 350 + 400 = 750 and V= 830. An operation e5 does not release any storage.
The last operation from the sequence Es is e8. The algorithm computes T = 247.9 and Vtemp = 750 + 500 = 1250 and V= 1250. This operation releases three storages, B8, B9, and B10. The updated storage released plan is = <(e3, (B4)), (e7, (B5)), (e6, (B3)), (e8, (B7, B8, B9))>.
Finally, Algorithm 3 returns T = 247.9 of time units, V = 1250 data blocks and = <(e3, (Bi4)), (e7, (B5)), (e6, (B3)), (e8, (B7, B8, B9))> for a sequence of operations Es.
4. Resource Allocation for a Group of Queries
Algorithm 4 takes on input a set of query processing plans {Es1, …, Esn} created by Algorithm 2, a set of estimated processing times = {T1, …, Tn}, a set of maximum storage requirements for each processing plan = {V1, …, Vn}, a set of deallocation plans from the Algorithm 3, and a sequence of persistent storage tiers L = <l0, …, ln>. The output of the algorithm is a sequence of storage allocation plans P.
First, the algorithm gets the estimated processing time T and the estimated highest allocation storage V for processing plans from . Next, the algorithm collects the candidate operations from , where a candidate operation is the first operation from each sequence, and puts them into a set of candidate operations Ec. Next, the algorithm picks one operation from Ec in the following way. First, the algorithm picks the operations from the sequences with the smallest volume, V. If more than one operation is found, then from the operations found so far, the algorithm picks the operations from the sequences with the shortest time, T. If again more than one operation is found, then the algorithm uses formula (3) to compute a profit for each operation and picks the operations with the highest profit. Again, if more than one operation is still found, then the algorithm randomly picks one operation. Let selected in this way, the candidate operation be ei = ({Bi, …, Bj}, {Bk, …, Bh}), and the total number of data blocks in output data sets of the operation be Vw.
Algorithm 4 passes the information about L, Vw, and P to Algorithm 4.1 to find the best partition and generate the updated storage allocation plan P. Next, Algorithm 4 must update L with information about temporary storage to be released after the processing of ei. To do so, Algorithm 4 passes a deallocation plan for Esi, a sequence of tiers L, and the operation ei to Algorithm 4.2 to update information about available storage in L.
Finally, an operation ei is removed from Esi. The algorithm repeats the steps above for each operation from each sequence until all sequences are empty. The algorithm returns the final storage allocation plan P.
| Algorithm 4: Generating storage allocation plans | |||
|
Input: A set of processing plans {Es1, …, Esn} from algorithm 2, deallocation plan , the maximum storage V, and the estimated processing time T for each sequence from Algorithm 3. A sequence of tiers L = <l0, …, ln> where each tier li is described as triple (ri, wi, <sij, …, sii>). Result: A sequence of allocation plans P = <Dij, …, Dnk>.
|
|||
| (1) Create empty sequence of allocation plans P = < >.
(2) While until all sequences in are empty do |
|||
| – Create an empty set of candidate operations Ec = {}.
– Get the first operations from the sequences with the smallest volume V and put them into Ec. |
|||
| if more than one operation is found in Ec then | |||
| – Keep the operations from the sequence Es1, …, Esn with the smallest estimated processing time T and remove the rest of the operations from Ec. | |||
| else if more than one operation is found in Ec then | |||
| – Keep the operations with the highest profit using formula (3) and remove the rest of the operations from Ec. | |||
| else if more than one operation is found in Ec then | |||
| – Select one operation randomly and make Ec empty. | |||
| end
– Let the selected operation be ei = {Bi, …, Bj}, {Bk, …, Bh} from Esj and its input storage be {Bi, …, Bj} and its output storage be {Bk, …, Bh}. – Let the number of total output storage be Vw. – Use the information of L, Vw, and P to find the best partition using Algorithm 4.1 and get the result of updated plan P from algorithm 4.1. – Pass the information about a deallocation plan , a state of multi-tiered persistent storage L, and the operation ei to Algorithm 4.2 to update L with information about temporary storage released by ei. – Remove ei from Esj. – Update estimated processing time T and V for Esj. |
|||
| end | |||
| (3) Return the sequence of multi-tiered storage allocation plans
P = <Dij, …, Dnk>. |
|||
Algorithm 4.1 finds the best partition using the information in L, Vw, P and ei provided by Algorithm 4.
Let ei be a member of Esj, and a set of allocation plans for ei is denoted Dji. First, the algorithm needs to find the best partition located at the highest possible tier in order to achieve the best processing time. Next, the algorithm finds a partition that can accommodate the storage Vw where Vw is the total output storage required to store the temporary/permanent result of ei. The input storage {Bi, …, Bj} is already assigned to one of the partitions on L. Therefore, the algorithm needs to find the best storage allocation for Vw only.
Next, the algorithm iterates over the tiers in L. Let the current tier be (rn, wn, <snj, …, sni>). The algorithm needs to check whether the required storage Vw can be allocated entirely in one partition or over more partitions. When the amount of storage available at one of the partitions in the highest tier is larger or equal to Vw, the algorithm creates an allocation plan (Bi, snj) where Bi = Vw and appends that plan to Dji. But sometimes, the amounts of storage available at all partitions in the highest tier are smaller than the required storage Vw. In that case, the algorithm splits storage Vw into multiple storages Vw‘, …, Vw”. Some storage is to be allocated at the faster tier, and some may be at the lower tier. For that case, the algorithm splits Vw to allocate more than one partition and creates allocation plans (Bi, snj), …, (Bj, snk). Next, the algorithm appends all those plans into Dji. Finally, the allocation plan Dji is appended to P and returned to Algorithm 4.
| Algorithm 4.1: Finding the best partition and generating a plan for storage allocations | ||||||
|
Input: A multi-tiered persistent storage L = <l0, …, ln>, storage requirements Vw of an operation ei, a sequence of storage allocation plans P. Result: The updated sequence of storage allocation plans P.
|
||||||
| (1) Let the amounts of temporary storage Vtemp = 0 and let an initial storage allocation plan Dji for the operation ei be empty. | ||||||
| (2) while iterate over L in reverse order do | ||||||
| (i) Let current tier be li = (ri, wi, <sii, …, sin>) and let <sii, …, sin> be a sequence of partitions in li arranged from the smallest to the largest partition.
(ii) Iterate over partitions <sii, …, sin> and choose a partition sik such that its size is equal or larger than Vw. |
||||||
| (iii) if size of sik is larger or equal to Vw then | ||||||
| – Create a pair (Bi, sni) where Bi = Vw and append it into Dji.
– Update sik = sik – Vw and Vw = Vtemp. – Sort a sequence of partitions arranged from smallest available storage to largest available storage. |
||||||
| else if all storage in current set is smaller than Vw then | ||||||
| – Update Vtemp = Vw.
while iterate over partition in reverse order and until Vtemp = 0 or all available storage become zero do |
||||||
| – Let the current storage in a set be sik.
– Split storage into two parts: Vw, where Vtemp = Vtemp – sni and Vw = sik – Create a pair (Bi, sik) where Bi = Vw and append it into Dji. – Update sii = 0, and Vw = Vtemp. – Sort a sequence of partitions arranged from smallest available storage to largest available storage. |
||||||
| end | ||||||
| end | ||||||
| end
(3) Append Dji = {(Bi, sni), …, (Bj, smk)} into P. |
||||||
| (4) Return P. | ||||||
Algorithm 4.2 releases persistent storage no longer needed by an operation ei. An input to the algorithm is a deallocation plan , a sequence of tier L = <(rn, wi, <sni, …, sni>), …, (r0, w0, <sn0, …, snj>)>, and the operation ei passed from Algorithm 4.
Algorithm 4.2 checks whether ei releases any persistent storage. If ei is a member of the deallocation plan , then the algorithm needs to update L according to the deallocation plan, such as removing the storage released by ei from the occupied storage. If ei is not a member of the deallocation plan, then the algorithm does not need to update L.
| Algorithm 4.2: Deallocation the storage | |||||
|
Input: A deallocation plan , a multi-tiered persistent storage L = <l0, …, ln>, and the operation ei. Result: The updated multi-tiered persistent storage L = <l0, …, ln>. |
|||||
| (1) if ei then | |||||
| – Get the storage released by ei like (Bx, …, By). | |||||
| while iterate over (Bx, …, By) do | |||||
| – Let current storage be Bi and the location of Bi be (Bi, shi) where storage Bi is located at partition i from tier lh.
– Remove a storage Bi from partition i in level lh and update shi = shi + Bi. – Let shi is belong to the sequence <shx, …, shy>. – Sort a sequence of partitions <shx, …, shy> arranged from smallest available storage to largest available storage. |
|||||
| end | |||||
| end | |||||
| (2) Return the updated L = <l0, …, ln>. | |||||
Algorithm 5 computes the total processing time Tf for the allocation plan P created by Algorithm 4. First, the algorithm iterates over plan P. Let the current set of plans be Dji = {(Bi, sni), …, (Bj, sik)} where Dji is a set of plans for the operation ei in sequence Esj. Next, the algorithm iterates over Dji. Let the current pair be (Bi, sni). Then, the algorithm computes the processing time for that pair. If Bi is a member of input data blocks for ei, then compute Tf = Tf + (Bi * rn) where rn is a reading speed per data block. If Bi is the member of output data blocks for ei, then compute Tf = Tf + (Bi * wn) where wn is a writing speed per data block. Next, the algorithm checks whether ei is the last operation in the sequence Esj or not. If ei is the last operation, then the algorithm needs to compute the reading time for final storage such as Tf = Tf + (Vw * rn), where Vw is the total data blocks written by operation ei. Finally, the algorithm returns the total execution time for plan P.
| Algorithm 5: Final estimated processing time for allocation plan | ||||||
|
Input: A sequence of allocation plans P = <Dij, …, Dnk>. Result: Total estimated processing time Tf for allocation plan P. |
||||||
| (1) Let total processing time for sequences be Tf = 0.
(2) while iterate over P do |
||||||
| – Set total writing data block be Vw = 0.
– Let the current plan be Dji = {(Bi, sni), …, (Bj, sik)} for operation ei = {Bi, …, Bj}, {Bk, …, Bh} from Esj. |
||||||
| while iterate over Dji then | ||||||
| – Let current pair be (Bi, sni) where Bi is a total number of data blocks allocated at a tier n in a partition i (sni).
if Bi is member of input storage {Bi, …, Bj} then |
||||||
| – Tf = Tf + (Bi * rn) | ||||||
| else | ||||||
| – Tf = Tf + (Bi * wn) | ||||||
| end | ||||||
| end | ||||||
| if ei is the last operation from Esj then | ||||||
| – Read the final result and release the storage.
– Update Tf = Tf + (Vw * rn). |
||||||
| end | ||||||
| end | ||||||
| (3) Return total processing time for allocation plan Tf. | ||||||
Example 3: In this example, we use a multi-tiered persistent storage with 3 tiers. We assume that the highest tier l2 has 3 partitions, the lower one l1 has 2 partitions, and the bottom tier l0 has 3 partitions. The parameters of the tiers are listed below.
L = <l0, l1, l2>
- l0 = (0.2, 0.21, <200, 500, 1000>)
- l1 = (0.1, 0.105, <100, 200>)
- l2 = (0.05, 0.055, <40, 50>)
Next, we use a set of sequences {Es1, Es2, Es3}. A sequence Es1 consists of the following 3 operations Es1 = <e1, e2, e3> where
- e1 = ({50, 50}, {100})
- e2 = ({100}, {50})
- e3 = ({50}, {20})
The total estimated processing time for Es1 is T2 = 37.85 and V1 = 150.
The sequence Es2 consists of one operation, Es2 = < e1> where
- e1 = ({150}, {100})
The total estimated processing time for Es2 is T2 = 40.50 and V2 = 100.
The last sequence Es3 consists of 4 operations Es3 = < e1, e3, e2, e4, > where
- e1 = ({50}, {40, 40})
- e2 = ({40}, {20})
- e3 = ({40}, {10})
- e4 = ({30}, {10})
The total estimated processing time for Es3 is T3 = 22.60 and V3 = 110.
Following step (2) of Algorithm 4, we picked an operation e1 from sequence Es2, because V2 is the smallest volume, and put it into Ec = {e1}. Since we have only one candidate operation, it is passed to Algorithm 4.1 to find the storage allocations for the outputs of operation e1. According to Algorithm 4.1, the best storage is s23 and therefore, we created a plan like (100, s23). We then appended the plan into P = <(100, s23)>. Next, Algorithm 4 released storage if e1 needs to release some storage. According to Algorithm 4.2, e1 does not need to release any storage. We repeated the above procedure and finally get the plan P for where P = <{(40, s21), (50, s22), (10, s11)}, {(40, s21), (40, s22)}, {(10, s22), (10, s11)}, {(10, s21)}, {(10, s21)}, {(40, s21), (50, s22), (10, s11)}, {(50, s11)}, {(20, s21)}>.
Next, we compute the processing time for a sequence of plan P by using the algorithm 5. The total processing time Tf for is 112.55 time units. With random allocation, the total processing time for become 143.45 time units. Without multi-tiered persistent storage with partitions, the total execution time for is 219.90 time units.
5. Example/Experiment
Different types of persistent storage devices such as SSD, HDD, and NVMe can be used to create a multi-tiered persistent storage system. In the experiment, we picked a sample multi-tiered persistent storage L that consists of 4 tiers <l0, l1, l2, l3>, where l3 is the fastest tier such as NVMe and l0 is the slowest tier, such as HDD and l2 and l1 are faster and slower SSDs. Each tier is divided into two partitions of different sizes. Table 1 shows the read and write speed per data block expressed in standardized time units and the total number of data blocks available at each partition.
Table 1: Read/Write Speed with Available Size for Multi-tiered Storage Devices
| Level of Devices | Reading Speed | Writing Speed | Partition 1 | Partition 2 |
| l0 | 0.15 * 103 | 0.155 * 103 | 1000 | 2000 |
| l1 | 0.1 * 103 | 0.105 * 103 | 500 | 600 |
| l2 | 0.08 * 103 | 0.085 * 103 | 150 | 200 |
| l3 | 0.05 * 103 | 0.055 * 103 | 50 | 100 |
In the experiment, we applied Algorithm 1 to convert eight query processing plans into the Extended Petri Nets. Next, we used Algorithm 2 to find the optimal sequences of operations for each Petri Net. Next, Algorithm 3 was used to get the deallocation plans , the maximum volumes V, and the estimated execution times T required for each sequence of operations found by Algorithm 2. The values for each sequence are the following.
Es1= <e1, e3, e2, e4, e5, e6, e7, e8, e9>
V1 = 150, T1 = 110.70
Table 2: Operations With Input and Output Data sets For Es1
| Operation | Input data set | Output data set |
| e1 | 300 | 100 |
| e2 | 200 | 50 |
| e3 | 100 | 50 |
| e4 | 50 | 20 |
| e5 | 50, 20 | 50 |
| e6 | 50 | 20, 20 |
| e7 | 20 | 10 |
| e8 | 20 | 10 |
| e9 | 10, 10 | 10 |
Es2= <e2, e5, e1, e4, e7, e9, e3, e6, e8, e11, e10, e12>
V2 = 300, T2 = 108.35
Table 3: Operations with Input and Output Data sets For Es2
| Operation | Input data set | Output data set |
| e1 | 100 | 50 |
| e2 | 100 | 70 |
| e3 | 100 | 60 |
| e4 | 50 | 30 |
| e5 | 70 | 30 |
| e6 | 60 | 40 |
| e7 | 30, 30 | 50 |
| e8 | 40 | 20 |
| e9 | 50 | 30 |
| e10 | 20 | 10 |
| e11 | 30 | 20 |
| e12 | 20, 10 | 20 |
Es3= <e1, e3, e2, e4, e7, e5, e8, e6, e11, e10, e9, e12, e13, e14, e15>
V3 = 300, T3 = 147.40
Table 4: Operations with Input and Output Data sets For Es3
| Operation | Input data set | Output data set |
| e1 | 500 | 400 |
| e2 | 600 | 300 |
| e3 | 400 | 100, 50 |
| e4 | 300 | 200, 50 |
| e5 | 100 | 30 |
| e6 | 50 | 30 |
| e7 | 200 | 100 |
| e8 | 50 | 10 |
| e9 | 30 | 20 |
| e10 | 30 | 10 |
| e11 | 100, 10 | 60 |
| e12 | 20 | 10 |
| e13 | 60 | 50 |
| e14 | 50 | 40 |
| e15 | 10, 10, 40 | 50 |
Es4= <e1, e2, e4, e3, e5 >
V4 = 250, T4 = 100.70
Table 5: Operations with Input and Output Data sets For Es4
| Operation | Input data set | Output data set |
| e1 | 80 | 70 |
| e2 | 70 | 30, 30 |
| e3 | 30 | 20 |
| e4 | 30 | 10 |
| e5 | 20, 10 | 20 |
Es5= <e1, e3, e5, e2, e4, e6, e7, e9, e8, e10 >
V5 = 200, T5 = 93.50
Table 6: Operations with Input and Output Data sets For Es5
| Operation | Input data set | Output data set |
| e1 | 300 | 100 |
| e2 | 100 | 50 |
| e3 | 200 | 100 |
| e4 | 50 | 30 |
| e5 | 100 | 50 |
| e6 | 30 | 20 |
| e7 | 100 | 50 |
| e8 | 50 | 30 |
| e9 | 20, 50 | 40 |
| e10 | 30, 40 | 50 |
Es6 = <e1, e2, e3>
V6 = 150, T6 = 37.85
Table 7: Operations with Input and Output Data sets For Es6
| Operation | Input data set | Output data set |
| e1 | 50, 50 | 100 |
| e2 | 100 | 50 |
| e3 | 50 | 20 |
Es7 = < e1>
V7 = 100, T7 = 40.50
Table 8: Operations with Input and Output Data sets For Es7
| Operation | Input data set | Output data set |
| e1 | 150 | 100 |
Es8 = < e1, e3, e2, e4, >
V8 = 110, T8 = 22.60
Table 9: Operations with Input and Output Data sets For Es8
| Operation | Input data set | Output data set |
| e1 | 50 | 40, 40 |
| e2 | 40 | 20 |
| e3 | 40 | 10 |
| e4 | 20, 10 | 10 |
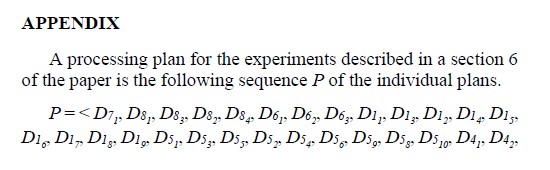
Next, we used Algorithm 4 to decide on an order of concurrent processing of operations from the sequences in . Algorithms 4.1 and 4.2 were used within Algorithm 4 to find the best allocation of partitions and to generate a persistent storage allocation plan. The details of the plan are listed in the Appendix. After that, we used Algorithm 5 to simulate the processing of the plan to get the total estimated execution time Tf, see Table X.
In the second experiment, we used the same set of sequences of operations , and whenever more than one operation could be selected for processing, we randomly picked an operation. The total execution time for the second experiment is given in Table X.
In the third experiment, we used only a single tier of persistent storage, and like before, whenever more than one operation could be selected for processing, we randomly picked an operation. The final results of all experiments are summarized in a Table X.
Table 10: Summary of Experimental Results
| Experiment | Method | Total execution time-units |
| Experiment 1 | Using allocation plan over multi-tiered persistend storage that proposed in this work. | 857 |
| Experiment 2 | Using random allocation plan over multi-tiered persistend storage. | 1,068.35 |
| Experiment 3 | Using allocation plan without multi-tiered persistend storage. | 1,466.95 |
By comparing those three results, one can find that the execution plan for experiment 1 achieves better performance and faster execution time than experiment 2 and experiment 3.
6. Summary and Future Work
This paper presents the algorithms that optimize the allocations of persistent storage over a multi-tiered persistent storage device when concurrently processing a number of database queries. The first algorithm converts a single query processing plan obtained from a database system into an Extended Petri Net. An Extended Petri Net represents many different sequences of database operations that can be used for the implementation of a query processing plan. The second algorithm finds in an Extended Petri Net a sequence of operations that optimizes storage allocation in multi-tiered persistent storage when a query is processed. The third algorithm estimates the maximum amount of persistent storage and processing time needed when a sequence of operations found by Algorithm 2 is processed.
In the second part of the paper, we considered the optimal allocation of multi-tiered persistent storage when concurrently processing a set of queries. We assumed that the first three algorithms are used for individual optimization of storage allocation plans for each query in a set. The fourth algorithm optimizes the allocation of multi-tiered persistent storage when a set of sequences of operations obtained from the first three algorithms is concurrently processed. The algorithm creates a persistent storage allocation and releases a plan according to the available size and speed of the devices implementing multi-tiered persistent storage.
The last algorithm processes a storage allocation plan created by the previous algorithm and returns the estimated processing time. To validate the proposed algorithms, we conducted several experiments that compared the efficiency of processing plans created by the algorithms with the random execution plans and execution plans without multi-tiered persistent storage. According to the outcomes of experiments, the storage allocation plans obtained from our algorithms consistently achieved better processing time than the other allocation plans.
Several interesting problems remain to be solved. An optimal allocation of persistent storage in the partitions of multi-tiered storage contributes to a dilemma of spreading a large allocation over smaller allocations at many higher-level partitions versus a single allocation at a lower partition.
Another interesting question is related to a correct choice of a level at which storage is allocated depending on the stage of query processing. It is almost always such that the initial stages of query processing operate on the large amounts of storage later reduced to the smaller results. It indicates that the early stages of query processing should be prioritized through storage allocations at higher levels of multi-tiered storage. It means that the parameters of multi-tiered storage allocation may depend on the phases of query processing with faster storage available at early stages.
The next interesting problem are the alternative multi-tiered storage allocation strategies. In one of the alternative approaches, after the serialization of Extended Petri Nets representing individual queries, it is possible to combine the sequence of operations into one large Extended Petri Net and apply serialization again. Yet another idea is to combine the Extended Petri Nets of individual queries into one Net and try to eliminate multiple accesses to common data containers.
The next stimulating problem is what to do when the predictions on the amounts of data read and/or written to multi-tiered persistent storage do not match the reality. A solution for these cases may require ad-hoc resource allocations and dynamic modifications of existing plans.
It is also possible that a set of queries can be dynamically changed during the processing. For example, a database application can be aborted, or it can fail. Then, the management of persistent storage also needs to be dynamically changed. A solution to such a problem would require the generation of a plan with the options where certain tasks are likely to increase or decrease their processing time.
Conflict of Interest
The authors declare no conflict of interest.
Acknowledgment
I would also like to extend my thanks to the anonymous reviewers for their valuable time and feedback. Finally, I wish to thank my parents for their support and encouragement throughout my study.
- Data Storage Trends in 2020 and Beyond, https://www.spiceworks.com/marketing/reports/storage-trends-in-2020-and-beyond/ (accessed on 30 April 2021)
- U. Sivarajah, M. M. Kamal, Z. Irani, V. Weerakkody, “Critical Analysis of Big Data Challenges and Analytical methods”. In Journal of Business Research, vol. 70, pp. 263–286, 2017.
- S. wang, Z. Lu, Q. Cao, H. Jiang, J. Yao, Y. Dong, P. Yang, C. Xie, “Exploration and Exploitation for Buffer-controlled HDD-Writes for SSD-HDD Hybrid Storage Server”, ACM Trans. Storage 18, 1, Article 6, February 2022.
- Apache Ignite Multi-tier Storage, https://ignite.apache.org/arch/multi-tier-storage.html (accessed on 30 April 2021)Trans. Roy. Soc. London, vol. A247, pp. 529–551, April 1955.
- Tiered Storage, https://searchstorage.techtarget.com/definition/tiered-storage (accessed on 30 April, 2021).
- E. Tyler, B. Pranav, W. Avani, Z. Erez, “Desperately Seeking Optimal Multi-Tier Cach Configurations”, In 12th USENIX Workshop on Hot Topics in Storage and File System (HotStorage 20), 2020.
- H. Shi, R. V. Arumugam, C. H. Foh, K. K. Khaing, “Optimal disk storage allocation for multi-tier storage system”, Digest APMRC, Singapore, 2012, pp. 1-7.
- N.N. Noon, “Automated performance tuning of database systems”, Master of Philosophy in Computer Science thesis, School of Computer Science and Software Engineering, University of Wollongong, 2017.
- N.N. Noon, J.R. Getta, “Optimisation of query processing with multilevel storage”, Lecture Notes in Computer Science, 9622 691-700. Da Nang, Vietnam Proceedings of the 8th Asian Conference, ACIIDS 2016.
- B. Raza, A. Sher, S. Afzal, A. Malik, A. Anjum, Adeel, Y. Jaya Kumar, “Autonomic workload performance tuning in large-scale data repositories”, Knowledge and Information Systems. 61. 10.1007/s10115-018-1272-0.
- N.N. Noon, J.R. Getta, T. Xia, “Optimization Query Processing for Multi-tiered Persistent Storage”, IEEE 4th International Conference on Computer and Communication Engineering Technology (CCET), 2021, pp. 131-135, doi: 10.1109/CCET52649.2021.9544285.
- R. Wolfgang, “Understanding Petri Nets: Modeling Techniques, Analysis Methods, Case Studies”, Springer Publishing Company, Incorporated, 2013.